Robot Balıklar
Balık sürüleri, yiyecek bulmalarına, göç etmelerine ve avcılardan kaçmalarına yardımcı olan karmaşık, senkronize davranışlar sergiler. Hiçbir balık veya balık grubu hiyerarşik olarak bu hareketleri koordine etmez ve balıklar daha sonra ne yapacakları konusunda birbirleriyle iletişim kurmazlar. Bu kolektif davranışlar çoğunlukla örtük koordinasyondan ortaya çıkar — birçok balık türü, sürü davranışı kararlarını yakındaki komşularına olan görsel gözlemlerine dayandırır ve bazı türler, düşük görüş koşullarında komşularını algılamak için yanal çizgilerini kullanır. Yerel komşu algısına dayalı kararlar alarak, bu balık sürüleri su altı iletişiminin doğasında var olan zorlukları zarif bir şekilde atlayarak merkeziyetsizleştirme yoluyla muazzam rakamlar ve dayanıklılık elde ediyorlar.
Şimdi, Harvard John A. Paulson Mühendislik ve Uygulamalı Bilimler Okulu (SEAS) ve Wyss Biyolojik Esinlenilmiş Mühendislik Enstitüsü’ndeki bir araştırma ekibi, balıklardan ilham alarak, dışarıdan kontrol olmadan hareketlerini gerçek bir balık sürüsü gibi senkronize edebilen robotlar geliştirdi. Araştırmacılar, su altı robotlarında örtük koordinasyonla karmaşık 3 boyutlu kolektif davranışları ilk kez uygulayabildiler.
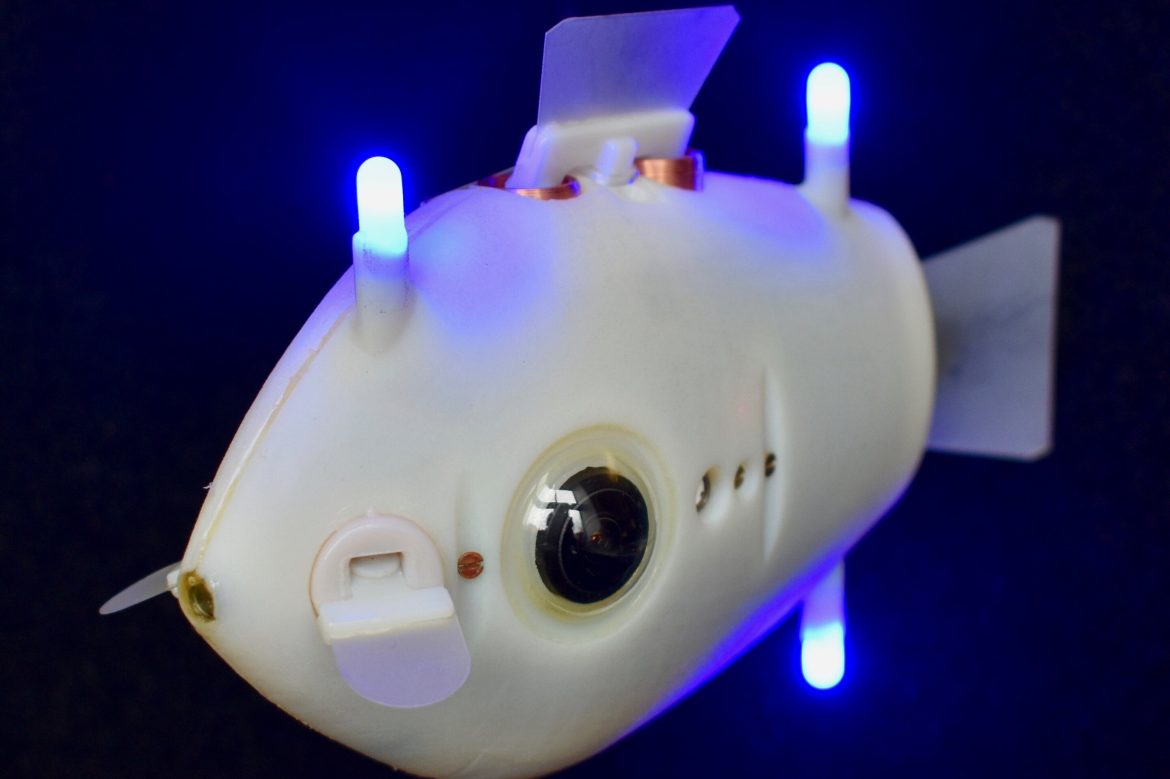
Bluebot adı verilen bu sevimli robotların çalışma prensibi şu şekilde: Robota neredeyse 360 derece görüş sağlayan göz kameraları, her bir robot üzerinde 86 milimetre aralıklı bulunan mavi LED’leri sürekli olarak diğerlerinde arayıp algılar. Bu basit bilgiyle, her Bluebot başka bir robota olan mesafesini belirleyebilir: Bir komşu yakınsa, bu iki LED arası mesafe uzak görünür; bir komşu uzaktaysa, LED’ler daha yakın görünecektir.
Her Bluebot, komşularının pozisyonlarına dolaylı olarak tepki veriyor. Yani, robotların bir araya gelmesini istiyorsak, o zaman her Bluebot, her bir komşusunun konumunu hesaplar ve merkeze doğru hareket eder. Robotların dağılmasını istiyorsak, Bluebotlar tam tersini yapar. Sürünün daire şeklinde hareket etmesi için, önlerindeki ışıkları saat yönünde takip edecek şekilde programlanması yeterlidir.
Araştırmacılar ayrıca tankta kırmızı bir ışığı bulmaya dayanan basit bir arama görevini de simüle ettiler. Bluebot’lar dağılım algoritmasını kullanarak, biri ışık kaynağına yaklaşıp onu algılayana kadar tanka yayılır. Robot ışığı algıladığında, LED’leri yanıp sönmeye başlar ve bu da sürünün geri kalanında toplama algoritmasını tetikler. Bu şekilde, tüm Bluebot’lar sinyal veren robotun etrafında toplanır.
Açıkça görülüyor ki, bu araştırmacılar sadece görsel algı ile etkileyici derecede karmaşık sürü davranışını sergileyen robotlar geliştirmeyi başardılar. Kameraların gitgide daha ucuz ve daha karmaşık hale gelmesi, Bluebot’lara ortamlarının daha zengin bir resmini algılamalarına olanak tanıyacak.
REFERENCES
- 1. https://techxplore.com/news/2021-01-fish-inspired-robots-movements.html
- 2. https://robotics.sciencemag.org/content/6/50/eabd8668